Description
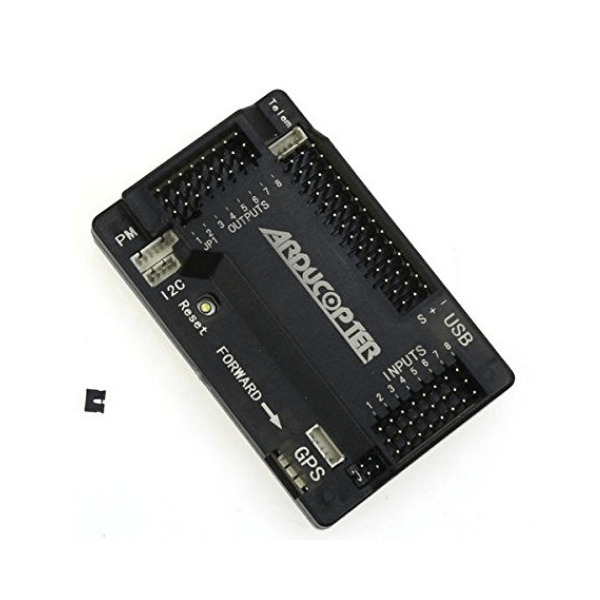
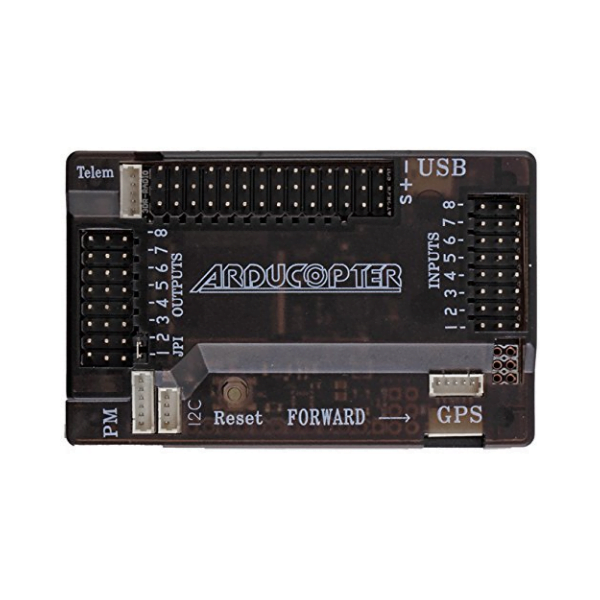
The APM 2.8 Multicopter Flight Controller is a complete open source autopilot system. This is the best selling technology that won the prestigious Outback Challenge UAV competition. It allows the user to turn any fixed, rotary-wing. In addition, it turns multirotor vehicle (even cars and boats) into a fully autonomous vehicle. meanwhile, it is capable of performing programmed GPS missions with waypoints.
APM Flight controller Using the built-in compass:
To use the built-in compass simply connect the jumper as shown below. The APM board will use the external compass, during the compass jumper is removed.

Powerful ground control software features:
The downloadable mission planner software is used to configure and control your Ardupilot board:
- Point-and-click waypoint entry, using Google Maps.
- Select mission commands from drop-down menus.
- Download mission logs files and analyzes them.
- Configure APM settings for your airframe.
- Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
- See the output from APM’s serial terminal.
Features :
- Straight Needle
- Arduino Compatible!
- Onboard 4 MegaByte Dataflash chip for automatic data logging.
- Optional off-board GPS, a uBlox LEA-6H module with Compass.
- One of the first open-source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
Specifications:
| Model | APM 2.8 |
| Power supply | LP2985-3.3. |
| Port | MUX (UART0, UART2, mnnI2, and OSD are optional, OSD is the defaulted output). |
| Input Voltage (V) | 12~16 VDC |
| Sensors | 3-Axis Gyrometer Accelerometer High-performance Barometer |
| Processor | ATMEGA2560 and ATMEGA32U-2 |
| Micro-SD Card Slot | No |
| Dimensions (mm) LxWxH | 70 x 45 x 15 |
*Product images are shown for illustrative purposes only and may differ from actual product.